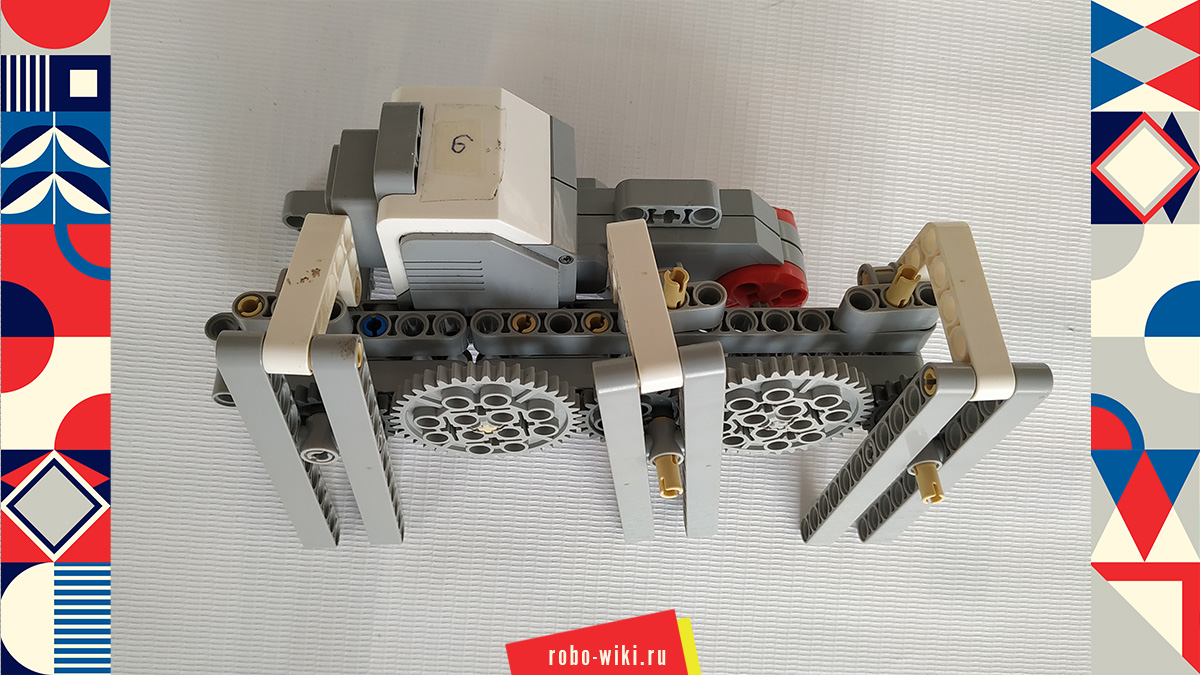
Шагающий шестиногий робот (гексапод) Lego EV3 на кривошипно-шатунном механизме — модель, которую можно собрать с использованием деталей двух коробок Lego EV3 (можно использовать вместо второй коробки допнабор). Есть творческая часть — нужно самостоятельно придумать крепление блока и соединить два мотора между собой. Полного описания сборки конструкции в инструкции нет — приведена только одна сторона с мотором. Ссылку на инструкцию смотри в описании.
Фото:
Оборудование: базовый набор Lego Mindstorms Education EV3, поле для соревнования.
Модель: ШШР-КШМ-В1 — шагающий шестиногий робот на кривошипно-шатунном механизме, вариант 1.
Описание. Гексаподы (от греч. hex — шесть) – класс шестиногих роботов, имитирующих в своем устройстве насекомых.
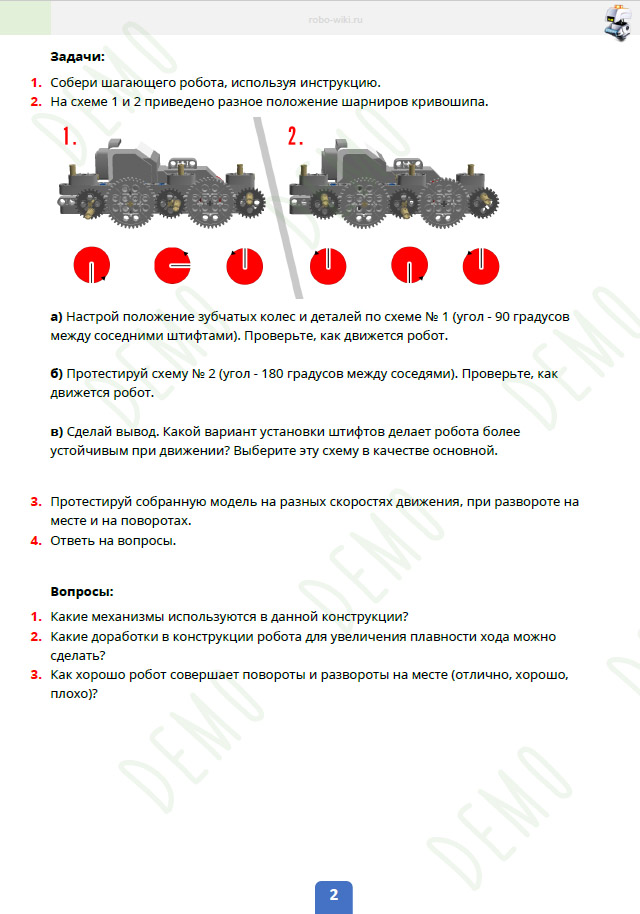
В данной модели шагающего робота каждая нога является частью кривошипно-шатунного механизма. Как он устроен смотри в Приложении. Верхняя часть ноги совершает возвратно-поступательное движение, как поршень в двигателе внутреннего сгорания (ДВС). Нижняя часть ноги (шатуна) описывает эллипс. Для увеличения плавности хода нужно строить робота на 8 ног.
Примеры страниц:



Для подписчиков (старый способ)
Чтобы скачать файлы, вы должны зарегистрироваться или войти на сайт, а также иметь платный аккаунт доступа. Если у вас есть действующий аккаунт доступа, ниже увидите кнопку для загрузки.
1301







